

— 道路测试事业部
GROUP INDUSTRY
样例展示
1.入场和离场场景名称:坡道遇静态障碍物绕行场景描述:自车以一定速度在下坡道上行驶,道路前方存在阻碍自车正常前进的静态障碍物,道路剩余空间仍然支持自车通过,自车要能够识别出障碍物并绕行通过。场景示意图: 场景ODD参数:
场景ODD参数:
通过指标:自车应该能够稳定在坡道上行驶,准确识别前方静态障碍物,进行局部路径规划顺利实现绕障,在绕障过程中不与障碍物发生碰撞与剐蹭事故。同一种测试场景下,重复30次测试,如果综合试验通过率不低于90%,且单次不通过试验中,出现危险状况时能够及时提醒安全员接管或者安全员能够主动接管,且不发生碰撞等危险事故,则认为测试车辆通过该场景测试。
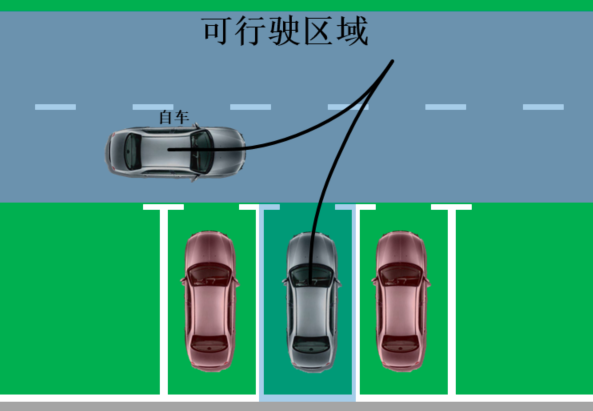
2.通道行驶场景名称:本车道遇静止障碍物绕行场景描述:自车以一定速度沿直线车道行驶,道路前方存在静止障碍物,相邻车道无并排行驶或对向行驶车辆(如图所示),则自车应能够绕过障碍物继续前行,且不能与障碍物发生碰撞。场景示意图: 场景ODD参数:静态障碍物类型
场景ODD参数:静态障碍物类型
水马、锥形桶、手推车、施工护栏、静止车辆
车道类型
直线单行、直线双行、曲线单行、曲线双行
光照条件
自然光照,室内光照,无光照,0~100lx
网联信号状况
有/无定位信号,有/无5G信号
通过指标:自车应能够识别前方静止障碍物减速停车或在道路标线允许的情况下绕过障碍物继续进行前行,车辆不应发生碰撞等事故;同一种测试场景下,重复30次测试,如果综合试验通过率不低于90%,且单次不通过试验中,出现危险状况时能过及时提醒安全员或安全员能够主动接管,且不发生碰撞等危险事故,则认为测试车辆通过该场景测试。
3.泊车测试
场景ODD参数:
|
坡道宽度
|
3m、5.5m、3.8m、7m
|
|
最小环形车道内半径
|
4m、5m、6m、无
|
|
坡道类型
|
直线单行、直线双行、曲线单行、曲线双行
|
|
自车速度
|
0~15km/h
|
|
目标车速度
|
0~15km/h
|
|
目标车加速度
|
0~4m/s²
|
2.通道行驶场景名称:本车道遇静止障碍物绕行场景描述:自车以一定速度沿直线车道行驶,道路前方存在静止障碍物,相邻车道无并排行驶或对向行驶车辆(如图所示),则自车应能够绕过障碍物继续前行,且不能与障碍物发生碰撞。场景示意图:
场景ODD参数:静态障碍物类型水马、锥形桶、手推车、施工护栏、静止车辆
车道类型
直线单行、直线双行、曲线单行、曲线双行
光照条件
自然光照,室内光照,无光照,0~100lx
网联信号状况
有/无定位信号,有/无5G信号
通过指标:自车应能够识别前方静止障碍物减速停车或在道路标线允许的情况下绕过障碍物继续进行前行,车辆不应发生碰撞等事故;同一种测试场景下,重复30次测试,如果综合试验通过率不低于90%,且单次不通过试验中,出现危险状况时能过及时提醒安全员或安全员能够主动接管,且不发生碰撞等危险事故,则认为测试车辆通过该场景测试。
3.泊车测试
场景名称:垂直车位自动泊车
场景描述:
目标车位为垂直车位,自车行驶至目标车位附近后根据周围环境在可行使区域进行垂直泊车。
场景示意图:
场景ODD参数:
|
自车速度 |
0~5km/h |
|
车位线颜色 |
白色、黄色 |
|
车位线类型 |
封闭线、边角线 |
|
相邻车位状态 |
两侧无车、一侧有车一侧无车、两侧有车 |
|
静态障碍物类型 |
水马、锥形桶、手推车、施工护栏、静止车辆 |
|
静态障碍物位置 |
区域A、区域B、区域C、区域D(详情见下图描述) |
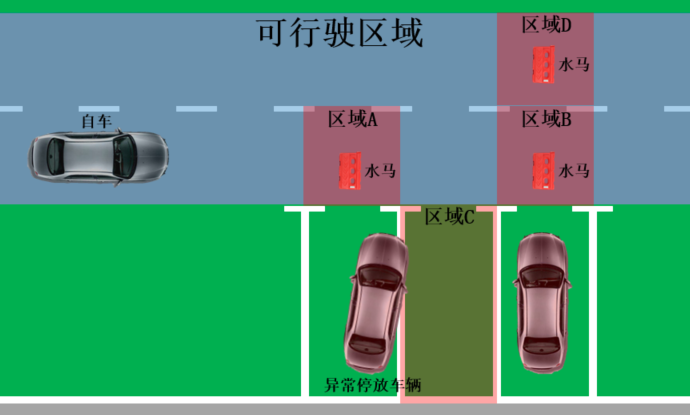
通过指标:
自车应该能够稳定行驶至目标停车位附近,准确识别出不同类型不同颜色不同线型的停车位,并且自车应能够在不与静态障碍物发生碰撞的情况下自动泊入目标停车位。同一种测试场景下,重复测试30次,如果综合试验通过率不低于90%,且单次不通过试验中,出现危险状况时能够及时提醒安全员接管或安全员能够主动接管,且不发生碰撞等危险事故,则认为测试车辆通过该测试。
邮箱:info@icv-ip.com(公司)
地址:上海市奉贤区金海公路6055号27号楼
hr@icv-ip.com (人才招募)

关注微信公众号
沪ICP备2021004863号-1 ![]() 沪公网安备31012002006305号 @2019、2020 上海智能网联汽车技术中心有限公司
沪公网安备31012002006305号 @2019、2020 上海智能网联汽车技术中心有限公司
版权所有 © 上海智能网联汽车技术中心有限公司
技术支持:极速建站